For my Texas A&M senior design project, my team of five mechanical engineers chose to design and build an autonomous seaweed collection robot, a project our professor considered over-ambitious. As the only team member with significant electrical or programming experience, I took full responsibility for all electrical systems and software development as well as a decent amount of the mechanical. Despite my professor’s initial skepticism about my ability to deliver on that many aspects of such a complex interdisciplinary project, I ultimately delivered, and we made a functional robot.
Initially we planned on retrofitting an existing electric beach cart to reduce workload, however due to a supplier issue, we ended up not being able to obtain an electric beach cart that wouldn’t instantly eat up the majority of our budget. This meant we had to create our own electric cart and do a full redesign, further adding to the already stressed timeline.
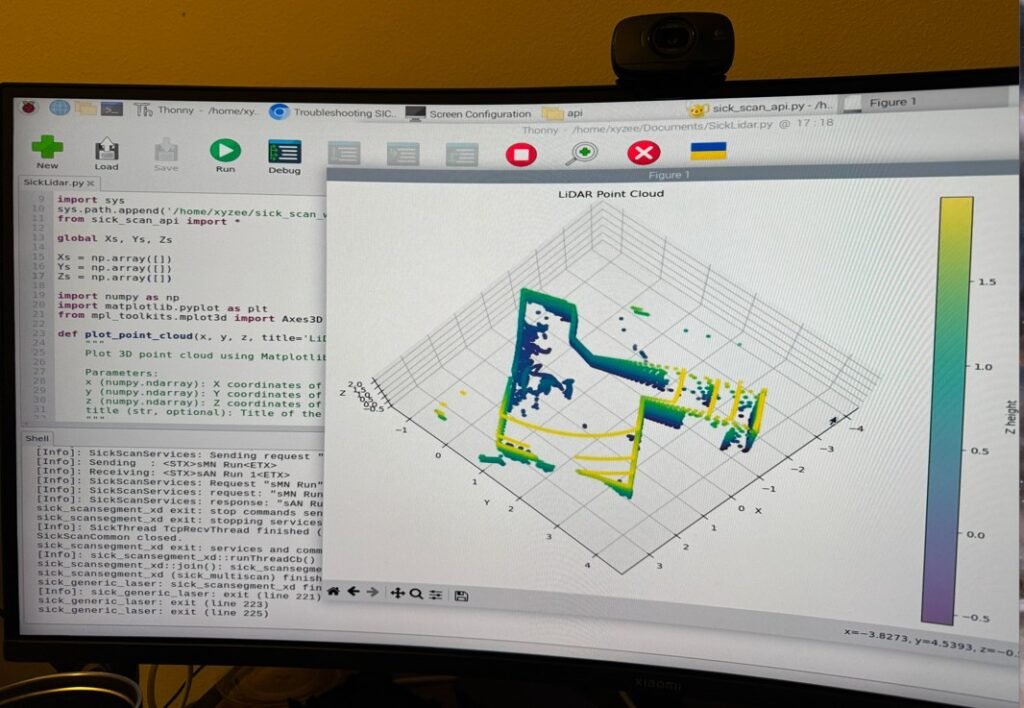
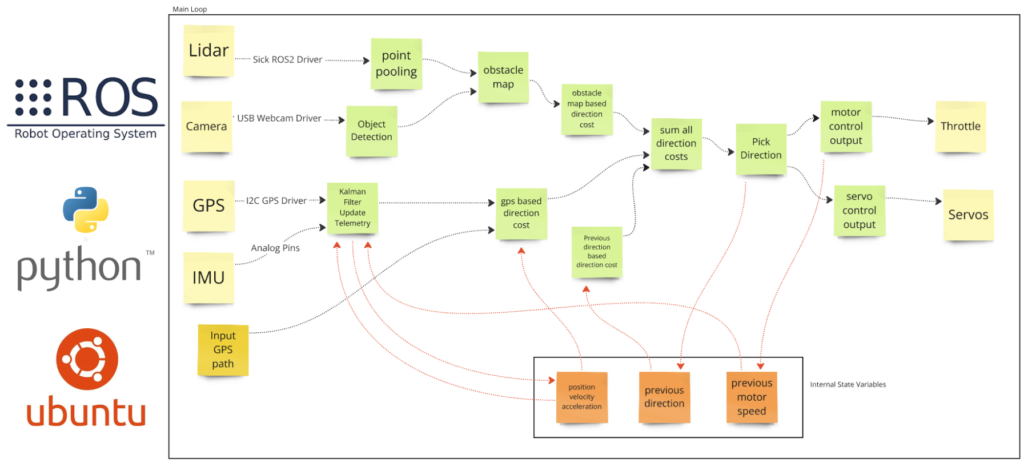
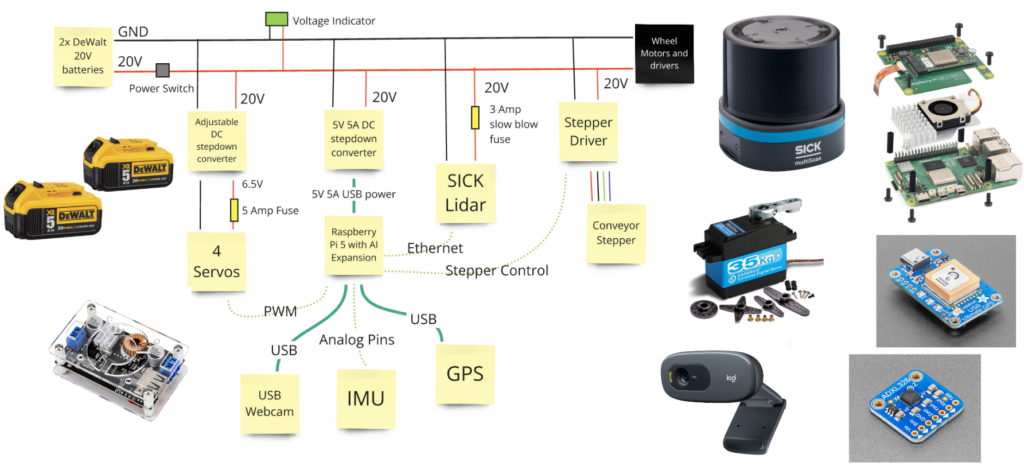
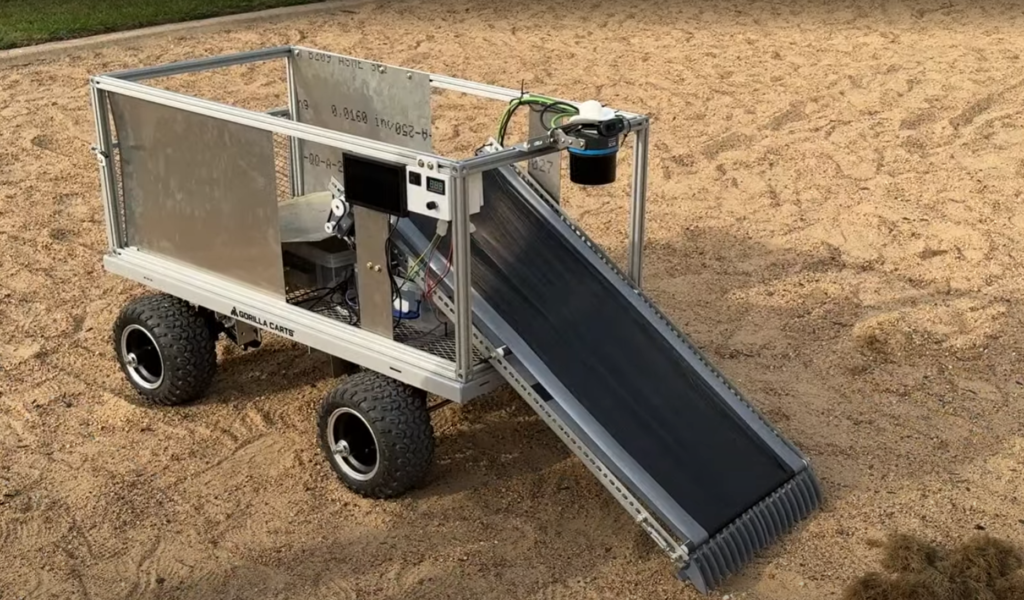
By entering and being selected for a competition hosted by SICK, an industrial LiDAR manufacturing company, we were given a 3D lidar unit to help with our project. The electrical system all came together and adaptations were made to accommodate the changing designs. The LiDAR’s built in IMU was used instead of a dedicated one, servo steering was swapped with differential drive steering for torque considerations, GPS was omitted in favor of LiDAR/IMU based positioning, and the batteries were upgraded. By using both the LiDAR and a camera with object recognition, the robot was able to detect and navigate around people and other obstacles.
The electrical system included a built in control panel and screen that allowed for easier programming and voltage monitoring. The conveyor belt could raise seaweed to collect it in the back. The batteries were able to last the entirety of our hours of testing, driving and programming the robot a single charge, and the robot could carry over 150 lbs. of weight without a noticeable drop in performance.
From this project, I learned the importance of reliability in component sourcing and being resourceful when things don’t go to plan. I also learned about Docker, ROS, a variety of communication protocols, and gained even more confidence in my ability to execute across disciplines.